 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLSTM change lane
Papers and Code
From Observation to Prediction: LSTM for Vehicle Lane Change Forecasting on Highway On/Off-Ramps
Jan 21, 2026On and off-ramps are understudied road sections even though they introduce a higher level of variation in highway interactions. Predicting vehicles' behavior in these areas can decrease the impact of uncertainty and increase road safety. In this paper, the difference between this Area of Interest (AoI) and a straight highway section is studied. Multi-layered LSTM architecture to train the AoI model with ExiD drone dataset is utilized. In the process, different prediction horizons and different models' workflow are tested. The results show great promise on horizons up to 4 seconds with prediction accuracy starting from about 76% for the AoI and 94% for the general highway scenarios on the maximum horizon.
Multi-Scenario Highway Lane-Change Intention Prediction: A Temporal Physics-Informed Multi-Modal Framework
Dec 30, 2025Lane-change intention prediction is safety-critical for autonomous driving and ADAS, but remains difficult in naturalistic traffic due to noisy kinematics, severe class imbalance, and limited generalization across heterogeneous highway scenarios. We propose Temporal Physics-Informed AI (TPI-AI), a hybrid framework that fuses deep temporal representations with physics-inspired interaction cues. A two-layer bidirectional LSTM (Bi-LSTM) encoder learns compact embeddings from multi-step trajectory histories; we concatenate these embeddings with kinematics-, safety-, and interaction-aware features (e.g., headway, TTC, and safe-gap indicators) and train a LightGBM classifier for three-class intention recognition (No-LC, Left-LC, Right-LC). To improve minority-class reliability, we apply imbalance-aware optimization including resampling/weighting and fold-wise threshold calibration. Experiments on two large-scale drone-based datasets, highD (straight highways) and exiD (ramp-rich environments), use location-based splits and evaluate prediction horizons T = 1, 2, 3 s. TPI-AI outperforms standalone LightGBM and Bi-LSTM baselines, achieving macro-F1 of 0.9562, 0.9124, 0.8345 on highD and 0.9247, 0.8197, 0.7605 on exiD at T = 1, 2, 3 s, respectively. These results show that combining physics-informed interaction features with learned temporal embeddings yields robust multi-scenario lane-change intention prediction.
Towards Infant Sleep-Optimized Driving: Synergizing Wearable and Vehicle Sensing in Intelligent Cruise Control
Jun 06, 2025Automated driving (AD) has substantially improved vehicle safety and driving comfort, but their impact on passenger well-being, particularly infant sleep, is not sufficiently studied. Sudden acceleration, abrupt braking, and sharp maneuvers can disrupt infant sleep, compromising both passenger comfort and parental convenience. To solve this problem, this paper explores the integration of reinforcement learning (RL) within AD to personalize driving behavior and optimally balance occupant comfort and travel efficiency. In particular, we propose an intelligent cruise control framework that adapts to varying driving conditions to enhance infant sleep quality by effectively synergizing wearable sensing and vehicle data. Long short-term memory (LSTM) and transformer-based neural networks are integrated with RL to model the relationship between driving behavior and infant sleep quality under diverse traffic and road conditions. Based on the sleep quality indicators from the wearable sensors, driving action data from vehicle controllers, and map data from map applications, the model dynamically computes the optimal driving aggressiveness level, which is subsequently translated into specific AD control strategies, e.g., the magnitude and frequency of acceleration, lane change, and overtaking. Simulation results demonstrate that the proposed solution significantly improves infant sleep quality compared to baseline methods, while preserving desirable travel efficiency.
Automatic driving lane change safety prediction model based on LSTM
Feb 28, 2024



Autonomous driving technology can improve traffic safety and reduce traffic accidents. In addition, it improves traffic flow, reduces congestion, saves energy and increases travel efficiency. In the relatively mature automatic driving technology, the automatic driving function is divided into several modules: perception, decision-making, planning and control, and a reasonable division of labor can improve the stability of the system. Therefore, autonomous vehicles need to have the ability to predict the trajectory of surrounding vehicles in order to make reasonable decision planning and safety measures to improve driving safety. By using deep learning method, a safety-sensitive deep learning model based on short term memory (LSTM) network is proposed. This model can alleviate the shortcomings of current automatic driving trajectory planning, and the output trajectory not only ensures high accuracy but also improves safety. The cell state simulation algorithm simulates the trackability of the trajectory generated by this model. The research results show that compared with the traditional model-based method, the trajectory prediction method based on LSTM network has obvious advantages in predicting the trajectory in the long time domain. The intention recognition module considering interactive information has higher prediction and accuracy, and the algorithm results show that the trajectory is very smooth based on the premise of safe prediction and efficient lane change. And autonomous vehicles can efficiently and safely complete lane changes.
LSTM-based Preceding Vehicle Behaviour Prediction during Aggressive Lane Change for ACC Application
May 05, 2023



The development of Adaptive Cruise Control (ACC) systems aims to enhance the safety and comfort of vehicles by automatically regulating the speed of the vehicle to ensure a safe gap from the preceding vehicle. However, conventional ACC systems are unable to adapt themselves to changing driving conditions and drivers' behavior. To address this limitation, we propose a Long Short-Term Memory (LSTM) based ACC system that can learn from past driving experiences and adapt and predict new situations in real time. The model is constructed based on the real-world highD dataset, acquired from German highways with the assistance of camera-equipped drones. We evaluated the ACC system under aggressive lane changes when the side lane preceding vehicle cut off, forcing the targeted driver to reduce speed. To this end, the proposed system was assessed on a simulated driving environment and compared with a feedforward Artificial Neural Network (ANN) model and Model Predictive Control (MPC) model. The results show that the LSTM-based system is 19.25% more accurate than the ANN model and 5.9% more accurate than the MPC model in terms of predicting future values of subject vehicle acceleration. The simulation is done in Matlab/Simulink environment.
A Novel Model for Driver Lane Change Prediction in Cooperative Adaptive Cruise Control Systems
May 01, 2023



Accurate lane change prediction can reduce potential accidents and contribute to higher road safety. Adaptive cruise control (ACC), lane departure avoidance (LDA), and lane keeping assistance (LKA) are some conventional modules in advanced driver assistance systems (ADAS). Thanks to vehicle-to-vehicle communication (V2V), vehicles can share traffic information with surrounding vehicles, enabling cooperative adaptive cruise control (CACC). While ACC relies on the vehicle's sensors to obtain the position and velocity of the leading vehicle, CACC also has access to the acceleration of multiple vehicles through V2V communication. This paper compares the type of information (position, velocity, acceleration) and the number of surrounding vehicles for driver lane change prediction. We trained an LSTM (Long Short-Term Memory) on the HighD dataset to predict lane change intention. Results indicate a significant improvement in accuracy with an increase in the number of surrounding vehicles and the information received from them. Specifically, the proposed model can predict the ego vehicle lane change with 59.15% and 92.43% accuracy in ACC and CACC scenarios, respectively.
A Unified Approach to Lane Change Intention Recognition and Driving Status Prediction through TCN-LSTM and Multi-Task Learning Models
Apr 25, 2023



Lane change (LC) is a continuous and complex operation process. Accurately detecting and predicting LC processes can help traffic participants better understand their surrounding environment, recognize potential LC safety hazards, and improve traffic safety. This present paper focuses on LC processes, developing an LC intention recognition (LC-IR) model and an LC status prediction (LC-SP) model. A novel ensemble temporal convolutional network with Long Short-Term Memory units (TCN-LSTM) is first proposed to capture long-range dependencies in sequential data. Then, three multi-task models (MTL-LSTM, MTL-TCN, MTL-TCN -LSTM) are developed to capture the intrinsic relationship among output indicators. Furthermore, a unified modeling framework for LC intention recognition and driving status prediction (LC-IR-SP) is developed. To validate the performance of the proposed models, a total number of 1023 vehicle trajectories is extracted from the CitySim dataset. The Pearson coefficient is employed to determine the related indicators. The results indicate that using150 frames as input length, the TCN-LSTM model with 96.67% accuracy outperforms TCN and LSTM models in LC intention classification and provides more balanced results for each class. Three proposed multi-tasking learning models provide markedly increased performance compared to corresponding single-task models, with an average reduction of 24.24% and 22.86% in the Mean Absolute Error (MAE) and Root Mean Square Error (RMSE), respectively. The developed LC-IR-SP model has promising applications for autonomous vehicles to identity lane change behaviors, calculate a real-time traffic conflict index and improve vehicle control strategies.
Explainable Online Lane Change Predictions on a Digital Twin with a Layer Normalized LSTM and Layer-wise Relevance Propagation
Apr 04, 2022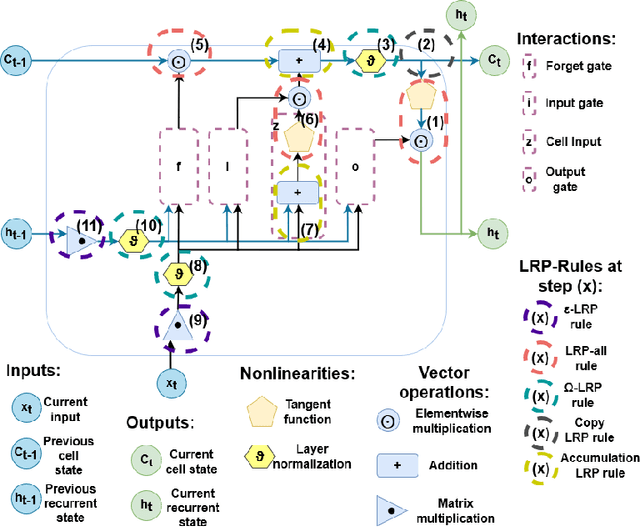
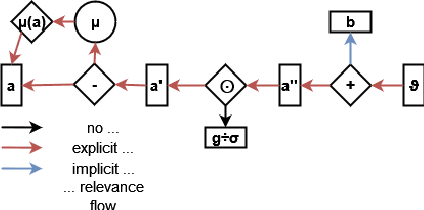
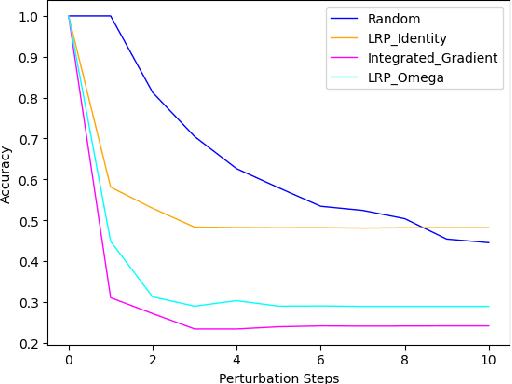

Artificial Intelligence and Digital Twins play an integral role in driving innovation in the domain of intelligent driving. Long short-term memory (LSTM) is a leading driver in the field of lane change prediction for manoeuvre anticipation. However, the decision-making process of such models is complex and non-transparent, hence reducing the trustworthiness of the smart solution. This work presents an innovative approach and a technical implementation for explaining lane change predictions of layer normalized LSTMs using Layer-wise Relevance Propagation (LRP). The core implementation includes consuming live data from a digital twin on a German highway, live predictions and explanations of lane changes by extending LRP to layer normalized LSTMs, and an interface for communicating and explaining the predictions to a human user. We aim to demonstrate faithful, understandable, and adaptable explanations of lane change prediction to increase the adoption and trustworthiness of AI systems that involve humans. Our research also emphases that explainability and state-of-the-art performance of ML models for manoeuvre anticipation go hand in hand without negatively affecting predictive effectiveness.
Topics in Deep Learning and Optimization Algorithms for IoT Applications in Smart Transportation
Oct 13, 2022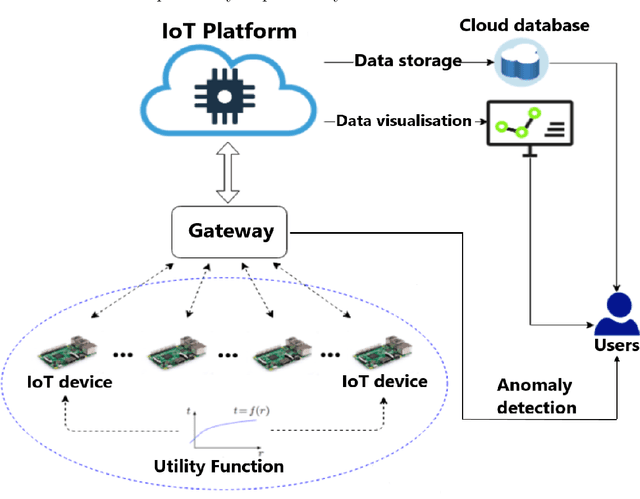
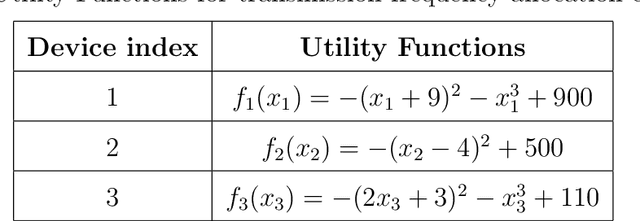
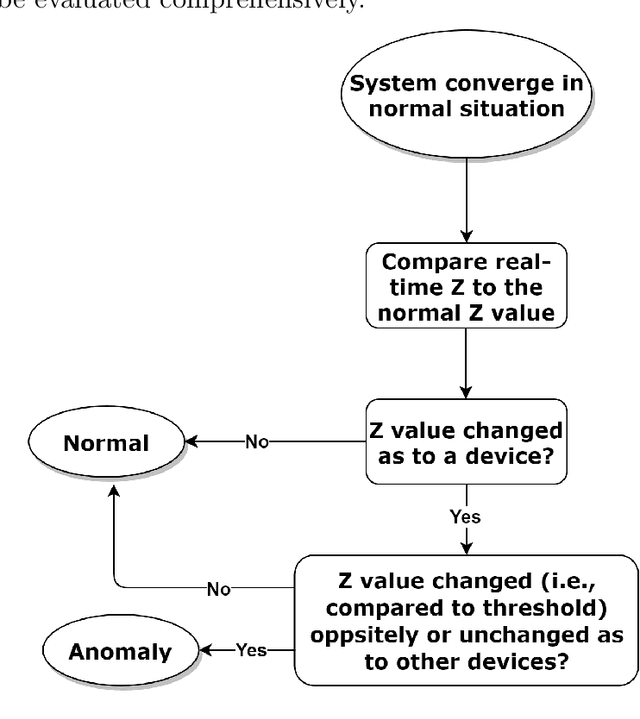

Nowadays, the Internet of Things (IoT) has become one of the most important technologies which enables a variety of connected and intelligent applications in smart cities. The smart decision making process of IoT devices not only relies on the large volume of data collected from their sensors, but also depends on advanced optimization theories and novel machine learning technologies which can process and analyse the collected data in specific network structure. Therefore, it becomes practically important to investigate how different optimization algorithms and machine learning techniques can be leveraged to improve system performance. As one of the most important vertical domains for IoT applications, smart transportation system has played a key role for providing real-world information and services to citizens by making their access to transport facilities easier and thus it is one of the key application areas to be explored in this thesis. In a nutshell, this thesis covers three key topics related to applying mathematical optimization and deep learning methods to IoT networks. In the first topic, we propose an optimal transmission frequency management scheme using decentralized ADMM-based method in a IoT network and introduce a mechanism to identify anomalies in data transmission frequency using an LSTM-based architecture. In the second topic, we leverage graph neural network (GNN) for demand prediction for shared bikes. In particular, we introduce a novel architecture, i.e., attention-based spatial temporal graph convolutional network (AST-GCN), to improve the prediction accuracy in real world datasets. In the last topic, we consider a highway traffic network scenario where frequent lane changing behaviors may occur with probability. A specific GNN based anomaly detector is devised to reveal such a probability driven by data collected in a dedicated mobility simulator.
Monocular Vision-based Prediction of Cut-in Maneuvers with LSTM Networks
Mar 21, 2022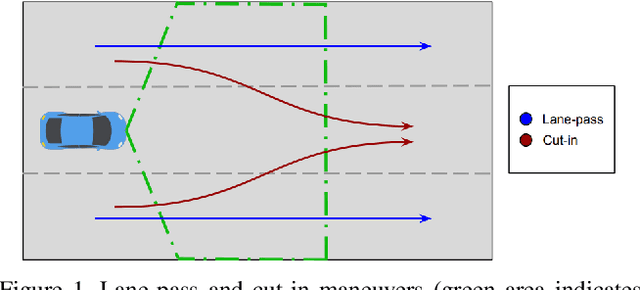
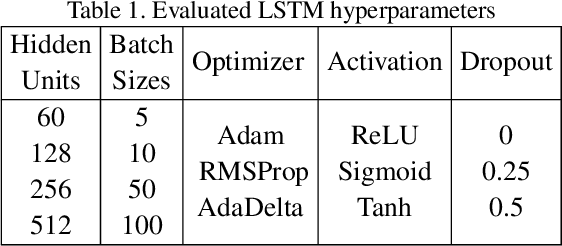
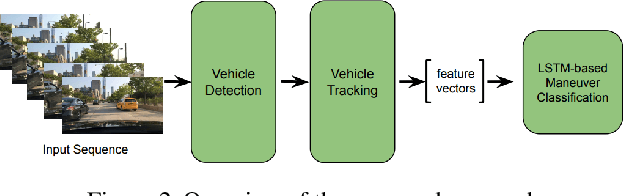
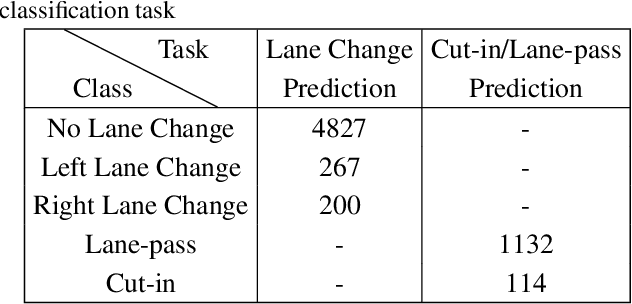
Advanced driver assistance and automated driving systems should be capable of predicting and avoiding dangerous situations. This study proposes a method to predict potentially dangerous cut-in maneuvers happening in the ego lane. We follow a computer vision-based approach that only employs a single in-vehicle RGB camera, and we classify the target vehicle's maneuver based on the recent video frames. Our algorithm consists of a CNN-based vehicle detection and tracking step and an LSTM-based maneuver classification step. It is more computationally efficient than other vision-based methods since it exploits a small number of features for the classification step rather than feeding CNNs with RGB frames. We evaluated our approach on a publicly available driving dataset and a lane change detection dataset. We obtained 0.9585 accuracy with side-aware two-class (cut-in vs. lane-pass) classification models. Experiment results also reveal that our approach outperforms state-of-the-art approaches when used for lane change detection.